
Биоэлектрические протезы нижней конечности
Бионические протезы позволили расширить возможности людей с инвалидностью. По своим функциям они максимально восполняют движения человеческой ноги, обеспечивают безопасность во всех фазах шага, естественность и гармоничность движений, дают пациенту ощущение уверенности на любой поверхности.
В основе современного протеза лежит микропроцессор. Он связан с большим количеством датчиков, расположенных по всему протезу. Сенсоры собирают информацию о наклоне поверхности и рельефе дороги, нагрузке на протез. Благодаря им центральный микропроцессор получает и обрабатывает всю необходимую информацию, в соответствии с которой и работает коленный модуль. Интеллектуальное управление протеза позволяет пользователю передвигаться в собственном удобном темпе.
Каркас протеза изготавливается из высокопрочных материалов, благодаря чему протез обладает повышенной надежностью и долговечностью. Питание всей системы осуществляет встроенная батарея, заряда которой хватает на период от трех до семи дней. Для управления протезом сегодня разрабатывают мобильные приложения. Необходимые функции работы можно индивидуально настраивать через смартфон или ПК. Для коммуникации с дистанционным управлением протезы имеют встроенный модуль Bluetooth.
История создания современных протезов находится в самом начале своего пути. Первый коленный модуль был разработан немецкой компанией Otto Bock и представлен на всемирной конференции по ортопедии в Нюрнберге в 1997 году. В России этот протез впервые пациенту установили в 2000 году. Пользователи могут ходить как в медленном, так и в быстром темпе, кататься на велосипеде.
Следующим важнейшим шагом в развитие современного протезирования стало объединение электронного коленного модуля и электронной стопы в одну систему. Появился протез Symbionic Leg, который представляет связку коленного модуля Rheo Knee и стопы Proprio Foot.
В 2015 году компания Otto Bock выпустила на российский рынок водонепроницаемый бионический протез бедра – Genium X3. С этим протезом человек может погружаться на глубину до трех метров в течение нескольких часов и заниматься любыми водными видами спорта.
История развития бионических протезов только началась, и впереди нас ждет открытие поистине неограниченных возможностей для людей с инвалидностью.
Стоимость протеза ноги с внешним источником питания (бионический):
от 1 млн. 300 тыс. руб. до 4 млн. 500 тыс. руб.
Коленный модуль Genium создан специально для людей с ампутацией на уровне бедра. Он позволяет воспроизвести практически естественную физиологическую походку человека. Genium позволяет подниматься по лестнице переменным шагом, практически без компенсирующих движений.
Коленный модуль Genium влагозащищен. С ним пациенту не нужно менять повседневный протез на протез с водонепроницаемым покрытием, чтобы, к примеру, принять душ.

Протез Genium был объявлен прорывом в протезировании. Одно из главных достоинств коленного модуля Genium X3 – это водонепроницаемость и устойчивость к коррозии. Это первый протез с электронным управлением, в котором можно заходить в воду, погружаться на глубину до трех метров в течение нескольких часов и заниматься любыми водными видами спорта.
Коленный модуль Genium X3 позволяет ходить назад, подниматься по лестнице не приставным, а переменным шагом. Бионическая система имеет специальный беговой режим. Батарея Genium X3 может работать более пяти дней без подзарядки, что обеспечивает пользователю непревзойденную свободу.
При помощи Genium X3 движения пользователя приближаются к естественной картине походки как никогда ранее. Множество специальных функций позволяют разгрузить здоровую конечность при односторонней ампутации. А при двусторонней ампутации позволяют человеку чувствовать себя на протезах более уверенно.

C-Leg - коленный гидравлический модуль, который полностью управляется микропроцессором, ориентируясь на индивидуальные особенности походки пользователя. Сенсорная система контролирует все данные и распознает, где находиться человек: на ровной плоскости или склоне, спускается по лестнице переменным шагом или гуляет.
Самый безопасный электронный коленный модуль, на нем практически невозможно споткнуться.
C-Leg 4 представляет собой новое поколение коленного модуля C-Leg при этом он надежнее и динамичнее. Переход из фазы опоры в фазу переноса происходит проще. Система выполняет более гармоничное управление чередой коротких шагов в условиях изменения скорости ходьбы. Новая технология позволяет легко передвигаться по разным поверхностям: грунту, песку, камням.
C-Leg 4 обладает защитой от попадания водяных брызг, в нем можно гулять по пляжу или отправиться на рыбалку.
Время работы без подзарядки от 16 часов до 2-х дней в зависимости от режима эксплуатации.

Коленный модуль Rheo Knee 3+ обеспечивает пациенту естественную походку. Это самообучающийся коленный модуль - он автоматически подстраивается к стилю ходьбы человека, в отличие от других коленных суставов с микропроцессорным управлением, которые навязывают определенный характер ходьбы.
Оснащен функцией ручного замка.
На неровной поверхности система поддержки опоры мгновенно активизируется, не позволяя человеку споткнуться или упасть. В коленный модуль Rheo Knee 3+ встроен дополнительный кинематический датчик для повышения безопасности в фазе опоры и улучшения устойчивости в положении стоя. Коленный модуль Rheo Knee нового поколения влагозащищен от брызг и дождя, его можно использовать почти в любых климатических условиях.
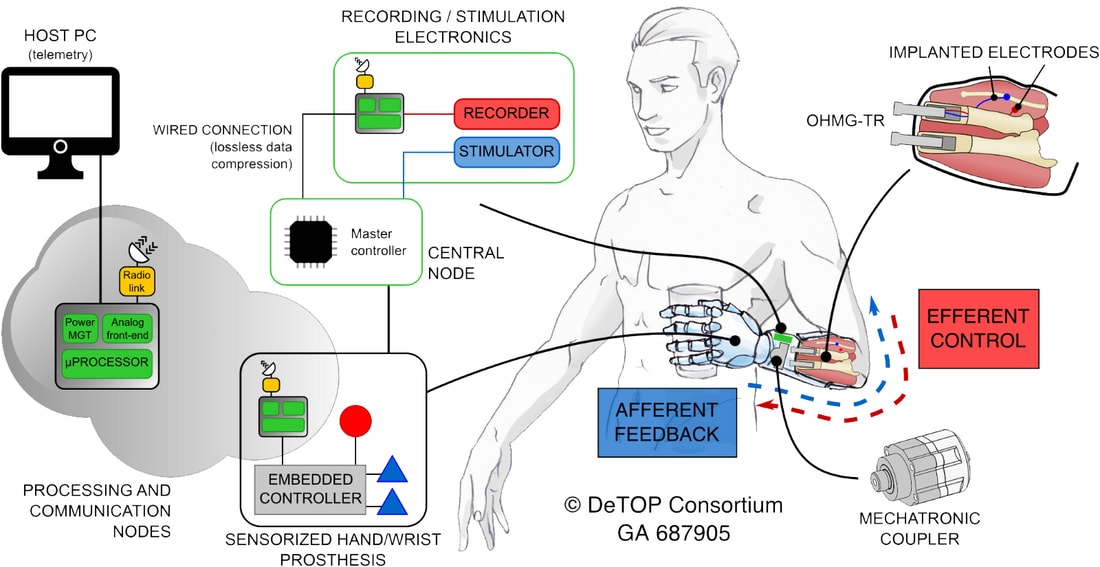
Принцип работы биоэлектрического протеза основан на считывании электронного потенциала мышц культи, который вырабатывается в процессе их сокращения. Считывание обеспечивают специальные чувствительные электроды, передающие сигнал в микропроцессор, где происходит обработка сигналов с помощью специальных компьютерных алгоритмов. Сформированные двигательные команды поступают в двигатели устройства, которые, в свою очередь, приводят в движение функциональные элементы протеза. Весь вышеозначенный цикл занимает доли секунды и его финальным результатом является какой-либо жест или хватательное действие.
Освоив управление бионическим протезом, можно без проблем пользоваться такими мелкими предметами, как ложки, вилки, карандаши, ручки и т.д. Однако использовать биоэлектрические протезы могут только взрослые люди, так как рост их тела закончился, и дорогостоящий протез можно не менять в течение жизни.
- Подбор протеза
- Активные протезы кисти
- Активные протезы предплечья
- Биоэлектрические протезы
- Дополнительные насадки на протез
- Реабилитация после протезирования
- VR-комплекс для реабилитации
- Процедура получения протеза
- Индивидуальная программа реабилитации
- Финансирование и компенсации
- Сообщество
- Отзывы
- Продвижение сайтов в Adlaim
- Блог
- Контакты
- Работа и стажировки
- Академия: Тренинги и Вебинары
- Партнерство
Пройдите опрос, чтобы мы могли дать точную оценку времени и стоимости протезирования
| Назад |
| Вперед |
| Отправить |
На данный момент компания Моторика не изготавливает протезы плеча. Мы понимаем, что потребность в функциональных протезах плеча достаточно большая, поэтому наша компания ведет разработку современного решения, которое появится в начале следующего года.
Оставьте ваш контактный телефон, чтобы мы информировали вас о выпуске современного протеза плеча.
1. Согласие дается на обработку следующих персональных данных Субъекта, не являющихся специальными или биометрическими: фамилия, имя, отчество, номер телефона, адрес электронной почты, иные сведения, которые Субъект добровольно предоставляет Оператору.
2. Под обработкой персональных данных Оператором понимается действие (операция) или совокупность действий (операций) с персональными данными с использованием средств автоматизации и/или без использования таких средств, включая сбор, запись, систематизацию, накопление, хранение, уточнение (обновление, изменение), извлечение, использование, передачу (распространение, предоставление, доступ), обезличивание, блокирование, удаление, уничтожение персональных данных.
3. Субъект дает свое согласие на обработку персональных данных для следующих целей:
Формирование заявки на обратный звонок и совершения такого звонка или нескольких звонков Оператором;
Формирования заявки на ответ письмом по электронной почте, подготовка и направление такого письма или нескольких писем Оператором;
Взаимодействие с Оператора с Субъектом, Субъекта с иными Пользователями Сайта, в том числе направление уведомлений, запросов и информации, касающихся услуг, работ, товаров Оператора;
Направление Субъекту уведомлений, новостных и информационных сообщений, касающихся оказываемых Оператором услуг, выполняемых работ, реализуемых товаров;
Таргетирование рекламных материалов, т.е. продвижение товаров, работ, услуг на рынке путем осуществления прямых контактов с Субъектом с помощью средств связи;
Проведение статистических и иных исследований Оператором на основе обезличенных данных.
4. Субъект персональных данных вправе направить Оператору запрос на уточнение его персональных данных, требование о блокировании или уничтожении в случае, если персональные данные являются неполными, устаревшими, неточными в соответствии с Политика в отношении обработки и защиты персональных данных Оператора.
5. Субъект несет ответственность за любые последствия, связанные с предоставлением неполных, недостоверных или неточных сведений, а также сведений, которые не относятся к Субъекту и предоставляются без согласия соответствующего лица.
6. Оператор не осуществляет трансграничную передачу персональных данных.
7. Персональные данные Субъекта обрабатываются до ликвидации Оператора.
8. Оператор принимает необходимые и достаточные организационные и технические меры для защиты персональных данных Субъекта от неправомерного или случайного доступа, уничтожения, изменения, блокирования, копирования, распространения, а также от иных неправомерных действий третьих лиц.
Человеческий организм чувствителен к воздействиям извне. В силу различных причин, будь то аварии, боевые действия, несчастные случаи или заболевания, люди лишаются конечностей. На протяжении всей своей истории человечество пыталось доступными путями восстановить утраченные функции организма. Ранее протезы ассоциировались с чем-то страшным, сам их внешний вид протеза как бы подчеркивал увечье человека.

Однако в наше время все меняется, некоторые протезы даже превращаются в объекты искусства.

Но главное, конечно, это не внешний вид, а функциональность. Если протезы, которые были распространены пару десятилетий назад, могли в лучшем случае выполнять опорную и незначительно косметическую функцию, то протезы, которые появляются в наше время, обладают функциональностью, близкой к естественной конечности. Более того, в последние годы стали появляться искусственные конечности, которые способны передавать ощущения. Некоторые футурологи предсказывают, что в ближайшее десятилетие люди с протезами верхних и нижних конечностей способны будут на большее, чем обладатели собственных рук и ног.
И одним из людей, который способствовал такому развитию сферы протезирования, является Хью Герр. Человек, которому в 17 лет ампутировали обе ноги ниже колена, не опустил руки.

Он начал самостоятельно разрабатывать функциональные протезы, причем весьма успешно. В последующем Хью Герр получил степень доктора наук в области биофизики и основал центр, который занимается разработкой инновационных протезов, основываясь на новейших технологических достижениях.
Пять лет назад на конференции TED Хью Герр продемонстрировал миру, что благодаря бионическим протезам ног (работа которых основана на принципах функционирования наших естественных конечностей) люди уже могут прекрасно бегать, заниматься скалолазанием и даже танцевать!
Фантастика, не правда ли? Но летом прошлого года этот же человек на очередной конференции TED снова смог поразить мир, продемонстрировав, что возможности протезирования нижних конечностей зашли еще дальше.
Но для такой плавности и естественности движений во время ампутации конечности различные группы мышц должны быть соединены определенным способом. Что же делать людям, у которых в силу различных причин невозможно подготовить остаточные мышцы должным образом? Неужели им нельзя претендовать на естественность и плавность походки по самым различным поверхностям? К счастью, современные технологии позволяют решить этот вопрос.

В прошлом году сотрудники Университета Вандербильта продемонстрировали рабочий прототип высокотехнологичной искусственной лодыжки. Благодаря наличию датчиков, моторов, сервоприводов и микрокомпьютера протез может без участия человека анализировать поверхность, по которой движется человек, будь то лестница, холм или ровная дорога, и самостоятельно адаптироваться к ней. Для адекватной работы разработанный прототип снабжен кабелем для подключения к электросети, однако уже ведутся работы по созданию автономного протеза, без ограничивающих проводов. По заверению создателей, такие протезы начнут применяться уже в ближайшие годы.
С ногами понятно. А что насчет функциональности протезов рук? За последние десятилетия искусственные верхние конечности сделали огромный шаг вперед. Уже создано немало технологий, позволяющих определять сокращения мышечных волокон в культе, а также считывать нервные импульсы достаточно четко, чтобы преобразовать их в сигналы для движения не то что кистью, но даже отдельным пальцем искусственной руки. С помощью современных протезов верхней конечности можно делать даже такие мелкие движения, как завязывание шнурков.
Конечно, людям нужно время, чтобы научиться управлять подобными протезами, напрягая отдельные мышцы культи. Обычно, чтобы добиться хорошего управления, у людей уходит около недели. В этом уже помогают и технологии виртуальной реальности: на культю конечности надевают датчики, а на голову человека гарнитуру, благодаря чему он видит нормальное продолжение своей руки и пытается повторить движения вслед за виртуальным аналогом. Когда человек научится нормально взаимодействовать с виртуальной рукой, он может начинать повторять аналогичные виртуальным движения с помощью протеза.
На помощь в настройке современных протезов приходят и специально разработанные мобильные приложения.
Совмещение современной робототехники и протезирования помогает добиться максимальной естественности движений. К примеру, когда мы тянемся за каким-то предметом, кисть руки еще до прикосновения к нему подсознательно принимает нужную форму для удобного взаимодействия. Пока что даже с продвинутыми протезами людям необходимо концентрироваться на каждом движении искусственной кисти, если они хотят взять что-либо.
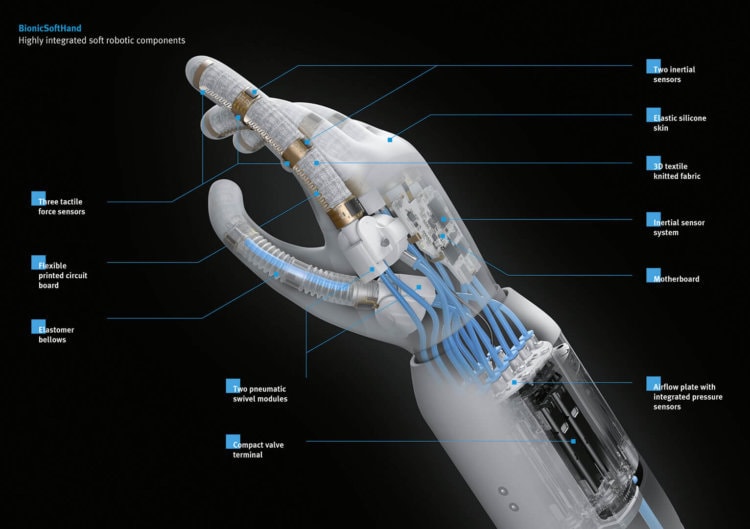
Пару месяцев назад немецкой компанией Festo была представлена искусственная рука BionicSoftHand, которая самостоятельно может составить правильный алгоритм манипуляций с объектами еще до того момента, как возьмет их.
Большую роль в удешевлении производства бионических протезов играет 3D-печать. Она позволяет делать протезы максимально подходящими под каждую конкретную ситуацию, а также индивидуальный дизайн для протеза. К примеру, компания Open Bionics совместно с Disney выпускают легкие и функциональные протезы Hero Arm, которые изменили отношение к своему состоянию у множества детей.

Однако по-настоящему великим событием стало появление протезов, способных передавать ощущения. К примеру, бионическая рука Bebionic опосредованно может воздействовать на остатки нервных волокон, которые, в свою очередь, передают полученную протезом информацию через спинной в головной мозг.

К нервам и мышцам культи верхней конечности были подключены 16 электродов, что также позволяло выполнять такие мелкие движения, как завязывание шнурков и набор текста на клавиатуре.
Изначально, до установки физического протеза, пациентка тренировалась управлять виртуальной рукой на экране монитора.
Кроме естественной функции, в современные протезы встраивают модули, позволяющие совершать платежи и управлять другими устройствами, фонарики, зарядку для телефона и многое другое.
Самое примечательное, что с каждым годом прогресс в функциональности искусственных конечностей только ускоряется. Недалек тот день, когда появятся протезы рук и ног, которые не только полностью восстановят все утраченные функции человека, но также подарят ему дополнительные возможности!
Аннотация научной статьи по компьютерным и информационным наукам, автор научной работы — Фролова Софья Сергеевна
Статья посвящена разработке алгоритма обработки электромиограммы (ЭМГ) для использования в биоэлектрическом протезе нижней конечности . Алгоритм , рассматриваемый в данной работе, отличается от других используемых алгоритмов обработки простотой реализации и точностью во время работы. Рассмотрены используемые методы вычисления огибающей, проведен их сравнительный анализ. Показано, что описываемый метод вычисления огибающей методом СКО минимален по времени, что крайне важно для слаженной работы протеза .
Похожие темы научных работ по компьютерным и информационным наукам , автор научной работы — Фролова Софья Сергеевна
РАЗРАБОТКА АЛГОРИТМА ОБРАБОТКИ ЭМГ ДЛЯ ИСПОЛЬЗОВАНИЯ В БИОЭЛЕКТРИЧЕСКОМ ПРОТЕЗЕ НИЖНЕЙ КОНЕЧНОСТИ Фролова С.С. Email: Frolova640@scientifictext.ru
Фролова Софья Сергеевна - студент, кафедра медико-технических информационных технологий, факультет биомедицинской техники, Московский государственный технический университет им. Н.Э. Баумана, г. Москва
Аннотация: статья посвящена разработке алгоритма обработки электромиограммы (ЭМГ) для использования в биоэлектрическом протезе нижней конечности. Алгоритм, рассматриваемый в данной работе, отличается от других используемых алгоритмов обработки простотой реализации и точностью во время работы. Рассмотрены используемые методы вычисления огибающей, проведен их сравнительный анализ. Показано, что описываемый метод вычисления огибающей методом СКО минимален по времени, что крайне важно для слаженной работы протеза.
Ключевые слова: протез, нижняя конечность, алгоритм, электромиографический сигнал, СКО (среднее квадратическое отклонение).
THE ELECTROMYOGRAM SIGNAL PROCESSING ALGORITHM FOR THE BIOELECTRONIC ARTIFICIAL LEG Frolova S.S.
Frolova Sofya Sergeevna - Student, DEPARTMENT MEDIC-TECHNICAL INFORMATION TECHNOLOGIES,
FACULTY BIOMEDICAL TECHNOLOGIES, N.E. BAUMAN MOSCOW STATE TECHNICAL UNIVERSITY, MOSCOW
Abstract: the article is concerned with the signal processing algorithm for the bioelectronic artificial leg. The algorithm in question differs from the other signal processing algorithm, which are usually using, by the simplicity of implementation and precision during the work. The review of different methods of computing the envelope and comparative analysis were done. It is shown that the mean square deviation method of computing the envelope is time -minimal method, what is extremely important for the co-operation of the artificial leg. Keywords: artificial leg, lower limb, algorithm, electromyogram signal, mean square deviation.
Сигнал электромиограммы (ЭМГ), считываемый с мышцы нижней конечности, является главной информацией для реализации движения протезом. Его обработка а, следовательно, и правильная интерпретация, осуществляют основную задачу данного медицинского прибора.
Обработка ЭМГ- сигнала происходит разными способами, и в это статье мы стараемся рассмотреть все варианты и выбрать наиболее оптимальный. Цель исследования
Работа посвящена разработке алгоритма обработки ЭМГ для использования в биоэлектрическом протезе нижней конечности, который отличался бы от используемых алгоритмов обработки простотой реализации и точностью во время
работы. Метод должен быть минимален по времени, так как это крайне важно для слаженной работы протеза.
Материал и методы исследования
Обработка электромиограммы (ЭМГ) начинается с фильтрации сигнала, которая оставляет лишь данные на частотах от 120 до 500 Гц - информативная часть ЭМГ-сигнала.
В зависимости от величины напряжения мышцы меняется и значение напряжения на электромиограмме: чем больше усилие мышцы, тем больше и ее активность, а, значит, величина ЭМГ сигнала тоже растет. Для обнаружения начала движения протеза необходимо найти огибающую сигнала, относительно начального положения которой будут видны рост и падение значений сигнала. Огибающая сигнала — это функция, построенная по характерным точкам данного сигнала. А значит, во-вторых, нужно рассчитать огибающую информативной части ЭМГ-сигнала, опираясь на данные которой протез будет осуществлять движение [1].
Так как полученные в итоге данные передаются со здоровой ноги на протез, то необходимо обеспечивать полное согласование работы в течение всех фаз шага.
Достичь требуемого при использовании ЭМГ-сигнала только от одной мышцы легче всего с помощью задержки работы протеза относительно здоровой ноги. Так, при обычной скорости ходьбы время задержки должно быть около 0,4 с, но с увеличением темпа ходьбы эта задержка уменьшается. Таким образом, ЭМГ-сигнал мышцы имеет прямую зависимость от усилия мышцы, а время задержки - обратную [2].
Процедуру обработки сигнала можно выполнять различными методами, но наиболее удобный заключается в том, чтобы сразу исключить постоянную составляющую сигнала и 50-Герцовую помеху - то есть поставить цифровой фильтр верхних частот (ФВЧ). Фильтр нижних частот стоит в электрической схеме после ИУ, поэтому в программе может не использоваться.
Следует учитывать, что в случае обработки ЭМГ для протеза время обработки сигнала должно быть минимальным - во избежание резких движений. А значит, и количество коэффициентов цифрового фильтра должно быть минимальным. Помимо этого фильтр должен обладать такими характеристиками, как простота разработки, малые искажения или их отсутствие [3].
Таблица 1. Сравнение КИХ- и БИХ-фильтров
Фильтр/параметр КИХ-фильтр БИХ-фильтр
Количество коэффициентов может быть небольшим может быть маленьким
Фазовая характеристика линейная нелинейная
Стабильность стабильны нестабильны
Эффективность менее эффективны более эффективны
Простота реализации просто сложно
Таким образом, опираясь на данные в таблице 1 и считая наиболее важными параметрами для выбора простоту реализации и линейность фазовой характеристики, будем реализовывать цифровой КИХ-фильтр. [4, 5]
Выбираемый КИХ-фильтр должен полностью заглушать 50-Герцовую помеху, иметь частоту среза Ре=120 Гц, частоту дискретизации рб=2000 Гц и минимальную неравномерность в полосе пропускания.
- Метод квадратов (СКО) ^ (5 1 2 + 52 2 ) , где 81 и 82- отсчеты сигнала
- Метод абсолютных значений 5 ' = , где 8 - отсчет сигнала
- Линейный 5п(0 = 51 + — £2)
- Квадратичный бпОО = б1 + й(I — 11) + d2(t — 11) (I — 12)
(с2 - с1)(сз - п)+ Ш^ТгЩз^Тг)+ (п - сз)(с2 - сз)
Выбор осуществляется из условий точности получаемых значений огибающей и простоты программной реализации. Рассмотрим методы в сравнительной таблице:
Таблица 2. Сравнение методов нахождения огибающей
Оценка / Метод Сложность реализации Точность
СКО средняя высокая
Абсолютных значений низкая низкая
Линейный пиков средняя средняя
Квадратичный пиков высокая высокая
Таким образом, опираясь на данные выше приведенной таблицы, выберем метод СКО.
Перед тем, как пациент начинает использовать протез, записывается сигнал с его мышцы в покое и вычисляется его СКО S. После того, как СКО в покое вычислено, осуществляется анализ степени сгибания. Под моментом начала движения t1 подразумевается момент времени, в который СКО, рассчитываемое по выборке из нескольких последовательных мгновенных значений ЭМГ, превысит 3S. Сравнительное значение 3S было выбрано для того, чтобы избежать работы протеза из-за помех. После выполнения движения ЭМГ-сигнал затухает естественным способом (так как данные считываются с одной мышцы), то есть нет необходимости дополнительного нахождения конца движения t2.
Таким образом, значение огибающей рассчитывается путем применения фильтра скользящего среднего, то есть по следующим формулам:
cn = Vzn - I2 + xN2 (1)
zn = V cn2 — xk2 (2)
Где формула (1) описывает добавление нового отсчета в расчет СКО, а формула (2) вычитание отсчета, который не входит в исследуемую область отсчетов. xk-значение сигнала первого отсчета, xN- значение сигнала последнего отсчета, сп-промежуточное значение огибающей (СКО), z- результирующая огибающая (СКО). Так как для программной реализации алгоритма следует выбрать наиболее быстрый способ, то формулы (1) и (2) следует упростить таким образом, чтобы они не содержали квадратного корня и не пересчитывали каждый раз квадраты всех отсчетов. Тогда воспользуемся алгоритмом aMax+pMin, согласно которому Vx2 + у2 « aMax + |3Min. Коэффициенты аир- числа, позволяющие достичь минимизации ошибки формулы. Рассмотрим несколько вариантов:
Алгоритм Наибольшая ошибка (%) Наибольшая ошибка (дБ) Средняя ошибка (%) Средняя ошибка (дБ)
Max+Min/2 11,8 0,97 8,6 0,71
Max+Min/4 -11,6 -1,07 -0,64 -0,06
Max+3Min/8 6,8 0,57 3,97 0,34
7(Max+Min/2)/8 -12,5 -1,16 -4,99 -0,45
15 (Max+Min/2 )/16 -6,25 -0,56 1,79 0,15
Таким образом, наименьшей ошибкой обладает алгоритм 15(Max+Min/2)/16, тогда формулу (2) можно упростить до вида:
сп = ТЁп-Г+хЙ2« « — М ах < т п - 1 , хЛ >+ — М т < т п - 1 , хЛ >(3) 16 32
Тогда формулу (3) можно преобразовать в следующую:
I—;-Г7 ) сп--хк, если гп > хк
12 (сп — хк), если гп Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Noskov Dmitrii Vladimirovich - Student, DEPARTMENT OF INFORMATION TECHNOLOGIES AND AUTOMATION, INSTITUTE OFRADIOELECTRONICS AND INFORMATION TECHNOLOGIES URAL FEDERAL UNIVERSITY NAMED AFTER THE FIRST PRESIDENT OF RUSSIA B.N.
Abstract: dassification is one of the main areas of processing and analysis of texts in natural language. It includes solutions to tasks such as determining the subject matter, determining the key of the text, and so on. This area is gaining increasing popularity every
Протезирование биоэлектрическое — специальный вид реабилитации больных в основном с культями верхних конечностей, предусматривающий обеспечение их протезами с биоэлектрическим управлением исполнительными механизмами (органами).
Протезирование биоэлектрическое осуществляется специализированными кабинетами протезно-ортопедических предприятий. Конструкции протезов, используемых при Протезировании биоэлектрическом, разрабатываются НИИ протезирования. Впервые протез предплечья с биоэлектрическим управлением изготовлен в 1958 г. в СССР За разработку такого протеза в 1970 г. группа советских специалистов удостоена Государственной премии СССР. Лицензии на его изготовление приобретены Англией, Канадой и другими странами. В СССР биоэлектрическое протезирование проводится бесплатно, за счет государства.
В основе П. б. лежит биоэлектрическое управление протезом с использованием в качестве сигналов биотоков мышц культи. Электрическая активность мышц культи (см. Биоэлектрическое управление) отводится с помощью электродов, соприкасающихся с кожей культи и расположенных в гильзе протеза. Порог срабатывания биоэлектрического протеза находится в пределах 25— 40 мкв. Поэтому при электрической активности мышцы в условиях ее свободного сокращения, равной 50 мкв (при максимальном сокращении 100 мкв), обеспечивается надежное управление протезом без утомления больного. Раздельность сокращения мышц-антагонистов, необходимая для управления движениями механизмов протеза, достигается специальной тренировкой под контролем зрения, к-рая обеспечивает больному информацию о характере активности управляющих мышц.
В практике протезирования используются протезы с релейным (ступенчатым) управлением движениями. В протезах предплечья с биоэлектрическим управлением имеется возможность сгибания и разгибания пальцев, а также ротации кисти. В протезах плеча, кроме этих движений, обеспечивается управление сгибанием и разгибанием в локтевом шарнире. Для больных с культей предплечья в пределах нижней трети предусмотрено комбинированное управление: биоэлектрическое — движениями пальцев кисти протеза и механическое (за счет просупинационных движений культи) — ротацией кисти. Разработаны протезы с пропорциональным (плавным) управлением, в которых скорость движения механизмов пропорциональна степени активности управляющих мышц. С помощью таких протезов возможно протезирование больных всех возрастных групп начиная с 4-летнего возраста.
Протезирование биоэлектрическое благодаря особенностям управления протезами и использованию внешнего источника энергии возвращает мышцам культи свойственную им функцию сокращения и расслабления, что способствует нормализации тканей культи и улучшению кровообращения в них. Кроме того, значительно снижаются энерготраты, уменьшаются компенсаторные движения, степень утомления больного, повышаются точность и координация осуществляемых действий и надежность удержания предметов.
П. б. включает подготовку к протезированию (см.), сам процесс протезирования, обучение управлению и пользованию протезом, а также диспансерное наблюдение.
Перед протезированием у больного выявляют величину электрической активности управляющих мышц культи и возможность их раздельного сокращения. При недостаточной электрической активности мышц культи или отсутствии раздельного сокращения мышц-антагонистов проводится специальная их тренировка при зрительном контроле по экрану осциллографа или шкале милливольтметра. Для детей используется специальный прибор, на панели к-рого высвечиваются фигуры животных (напр., волка и зайца). В случае сниженного тонуса мышц либо их атрофии, при отеке мягких тканей назначается общеукрепляющая и фантомно-импульсивная гимнастика, массаж и электростимуляция мышц культи. Тренировка мышц под контролем зрения вырабатывает привычку к управлению макетом протеза, а у детей — к управлению электромеханическими игрушками. При подготовке к протезированию с использованием протеза с дополнительными управляемыми движениями тренировка больного усложняется. Она включает обучение чередованию произвольного сокращения мышц и ротационных движений культи или произвольного сокращения мышц с разной амплитудой электрической активности и произвольного сокращения мышц с перемещением культи в пространстве. Т. к. последнее является элементом обучения управлению протезом, то наилучшие результаты достигаются при наличии собранного к примерке протеза; одновременно окончательно подбирают места расположения токосъемников и определяется возможность отведения биопотенциалов в условиях нагрузки культи весом протеза.
Важным элементом протезирования является тщательное изготовление гипсового негатива, определяющего форму приемной гильзы и места прилегания токосъемников. Места расположения токосъемников соответствуют проекции на приемную гильзу участков отведения наилучшей электрической активности мышц культи, выбранных для управления протезом.
После изготовления протеза проводится обучение управлению им в различных положениях протезируемой конечности с учетом управления как за счет биопотенциалов, так и активной подвижности, а также с использованием пассивного перемещения узлов протеза. Одновременно обучают простейшим элементам пользования протезом — захвату предметов кистью и лишь затем — выполнению более сложных предметных действий, постепенно усложняя их характер.
Контроль за результатами протезирования осуществляется на специальном стенде с имитаторами бытовых и рабочих действий, с помощью тестовых заданий, определения площади рабочего поля и других методик. После выдачи протеза проводится систематическое наблюдение за больным: первый осмотр через 1 — —3 мес., а в последующем — 2 раза в год.
Показания к назначению биоэлектрических протезов определяются медицинскими требованиями, клинико-физиологическими особенностями больного, техническими характеристиками протеза, экономическими, организационными и социальными факторами. Биоэлектрические протезы показаны больным в возрасте от 16 до 60 лет с культей предплечья (кроме короткой), плеча в пределах средней трети, при аномалии развития верхней конечности; при первичном протезировании или при желании больного освоить новую конструкцию протеза; при повторном протезировании: больным, профессия и любительские занятия которых требует тонкой координации движений и удовлетворительной силы захвата. Внедрение протезов для детей, как показал опыт, обеспечивает более благоприятные условия для гармоничного физического и психического развития детей с дефектами верхних конечностей.
Качество П. б. зависит от целого комплекса факторов, включая характер ампутации и послеоперационного лечения, определяющих последующее функциональное состояние культи. Боли в культе, вызывая охранительную реакцию, ограничивают степень напряжения мышц.
Различные пороки культи (обширный, спаянный с подлежащими тканями либо препятствующий движениям в суставах рубец, болезненная неврома, заостренный край костного опила, остеофиты, фиксация усеченного конца мышцы на культе в состоянии расслабления и др.) являются временными противопоказаниями для протезирования. Протезирование биоэлектрическое возможно после хирургического лечения указанных пороков культи, включающего и метод раздельной фиксации мышц-антагонистов к кости.
Библиография: Гурфинкель В. С. и др. Биоэлектрическое управление, М., 1972; Руководство по протезированию, под ред. Н. И. Кондрашина, М., 1976; Славуцкий Я. Л. Физиологические аспекты биоэлектрического управления протезами, М., 1982.
Читайте также: