
Технология изготовления протезов верхних конечностей
Послеоперационный период после ампутации нижней конечности включает в себя активизацию пациента, контролируемое эластическое бинтование культи, применение компрессионного белья 
и раннее протезирование. Основные ортопедо-технические задачи по дальнейшей реабилитации пациента возникают после заживления послеоперационной раны, которые решаются на первом этапе путем изготовления лечебно-тренировочного протеза. На следующем этапе первичного протезирования начинают изготовление постоянного протеза, при этом временный протез должен соответствовать постоянному по своим функциональным возможностям. Возникающие в процессе первичного протезирования колебания линейных и объемных параметров культи можно компенсировать с помощью подгонки гильзы до тех пор, пока не наступит стабилизация ее размеров и формы.
Самостоятельная ходьба пациента на протезе, его эксплуатационные характеристики, вт. ч. удобство при постоянной носке в значительной мере зависят от индивидуальных особенностей пациента и формы приемной гильзы. Таким образом, изготовление гипсовой модели требует особой тщательности и должно по возможности проводиться при определенной нагрузке на культю. С этой целью были разработаны специальные приспособления и приборы для реализации соответствующей гипсовой техники при различных уровнях ампутации. На практике они особенно хорошо проявили себя у пациентов с культей голени и после вычленения в тазобедренном суставе.

В сложных и атипичных случаях деформации культи бедра для изготовления продольно-овальной гильзе при систематизированной технике моделирования используют гипсовый аппарат SIT*-Cast. В последние годы большое значение приобрело компьютерное моделирование и изготовление индивидуальных приемных гильз.

При этом размеры культи пациента используют в качестве базы для фрезерования модели. Техник-ортопед может с помощью программно-математического обеспечения смоделировать на персональном компьютере (ПК) требуемую форму гильзы для конкретного пациента. По полученным данным изготавливают термопластическую пробную гильзу. При окончательном изготовлении приемной гильзы используют термопластик или слоистый пластик на основе литьевой смолы, которые все больше вытесняют традиционный материал - дерево. Приемные гильзы протеза могут быть жесткими или гибкими, а в зависимости от уровня ампутации дополнительно содержать внутреннюю гильзу с эластичными стенками или лайнер. В зависимости от материала, длины культи, области применения и т.д. существуют различные технические решения для соединения гильзы протеза с его механическими узлами.

Гильзу протеза и комплектующие детали при его изготовлении устанавливают в сборочном аппарате с учетом статических характеристик соединяют между собой. Комплектующие из дерева или пластмассы склеивают, модульные узлы соединяют винтами.
Во время примерки оценивают позу пациента при стоянии, его ходьбу на протезе с тем, что бы, например, определить оптимальную форму приемной гильзы, длину протеза и положение составляющих его элементов. С помощью лазерной измерительной установки можно определить центр тяжести тела пациента и индивидуальную линию нагрузки. Для этого пациент встает на динамометрическую платформу и на протез направляют лазерный луч, проверяя, таким образом, схему сборки протеза. На этапе первичного протезирования примерки и подгонка протеза представляют собой сложную, часто очень длительную процедуру. При этом пациент должен воспринимать протез как главное средство дальнейшей реабилитации, научиться его надевать, а также стоять, сидеть, ходить и осуществлять на этом протезе другие жизненные функции. После завершения примерки протез готов к технологическому завершению. Для протезов каркасного исполнения это означает: уменьшение толщины стенки, придание формы и обработка наружной поверхности с армированием посредством пергамента или ламината из литьевой смолы. В модульных протезах после окончательного изготовления приемной гильзы модули полностью соединяются между собой и затем фиксируются. Придание таким протезам анатомической формы производится вручную путем обработки облицовки из вспененных материалов, что существенно увеличивает затраты на изготовление протеза. Альтернативой такому варианту является изготовление косметического покрытия на оборудовании с ЧПУ по параметрам конечности конкретного пациента, используя для этого сервисные службы. При индивидуальных консультациях следует обучать пациента уходу за протезом, культей, чехлами, оказывать им помощь в надевании протеза, функциональной обуви, помогать осваивать основные элементы ходьбы на протезе.
Как составную часть мер по реабилитации пациента на заключительном этапе протезирования следует рассматривать обучение ходьбе на протезе. Такое обучение можно проводить уже на временном протезе под контролем специалиста ЛФК. Индивидуальный комплекс реабилитации у пациентов с культями нижних конечностей направлен на восстановление его двигательных функций, в частности умение, обращаться с протезом в различных повседневных ситуациях, правильное применение дополнительных средств опоры для пожилых пациентов, преодоление чередующихся спусков и подъемов на лестницах.





Значение рук в жизни человека переоценить невозможно. Кисть является не просто органом для трудовой деятельности, но и созидательным органом, двигающим человека дальше по эволюционному пути. К сожалению, в современном мире мы наблюдаем огромное количество причин, по которым человек может потерять свои руки целиком или частично. В таких непростых обстоятельствах единственной надеждой человека становится протезирование.
Не только протез!







Рабочие протезы – это функциональные протезы, предназначенные для выполнения различных трудовых операций дома и на работе. Чаще всего такого рода протезы изготавливаются со сменными насадками, где каждая насадка предназначена для выполнения конкретного действия

Рабочие протезы не похожи на здоровую конечность, однако в качестве насадки может быть использована косметическая кисть, и тогда протез может использоваться как косметический.
Рабочие протезы могут быть изготовлены на любой уровень усечения, при двустороннем усечении зачастую является одним из основных для самообслуживания
Активные (тяговые протезы)
Протезы с активным схватом

Протезы с пассивным схватом

Пациент, нагружая систему крепления, открывает искусственную кисть или сгибает локоть, а пружина закрывает кисть, при этом модуль локтя ( в протезах плеча) ставится на замок. Сила схвата в таких протезах прямо пропорциональна силе натяжения пружины и пациент не получает обратной связи от кисти. Качество тяговой кисти определяется величиной раскрытия пальцев, силой схвата, легкостью открытия.
Рука человека — универсальный инструмент, способный как выполнять силовые операции, так и аккуратно и надежно удерживать хрупкие предметы. Утрата верхних конечностей является одной из древнейших проблем человечества, решение которой стало возможным благодаря научному и техническому прогрессу.
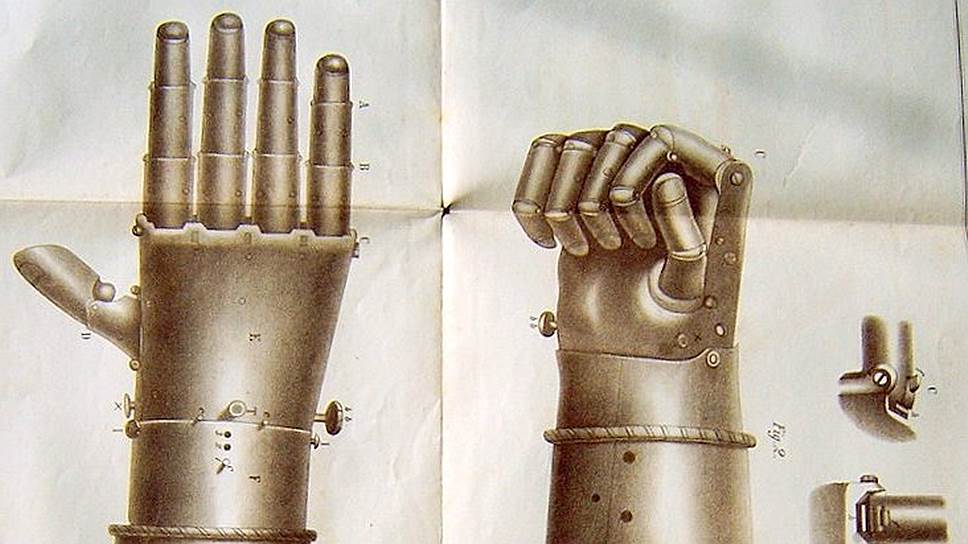
От железной руки до бионического протеза
Задачу замены утраченных конечностей человечество пыталось решить еще в античности. Самым известным протезом средневековья является "железная рука" рыцаря фон Берлихингена, сделанная в 1504 году. Протез был похож на железную перчатку с пятью пальцами, которые с помощью шестерни могли поворачиваться и фиксироваться, что позволяло удерживать предметы или оружие. Крепился протез к руке кожаными ремнями. Примерно в ту же эпоху подвижные искусственные конечности сконструировал француз Амбруаз Паре. В начале XIX века немецкий стоматолог и хирург Петер Балифф придумал способ управлять пальцами протеза при помощи движения локтевого сустава. Для этого были использованы тяги, закрепленные на плече пациента так, что при разгибании локтевого сустава пальцы разгибались и, наоборот, для захвата предмета протезом необходимо было согнуть локоть.
После Второй мировой войны для передачи движения пальцам протеза стали использоваться электрические двигатели. В конце 1960-х годов была разработана первая миоэлектрическая система управления, в основе которой лежат методы регистрации и анализа мышечных биопотенциалов (электромиограмма, ЭМГ) человека. Несколько электродов закрепляются на поверхности кожи человека и позволяют измерять электрические импульсы, которые возникают при напряжении и расслаблении мышцы. Эти импульсы через электронные преобразователи передаются к моторам, которые перемещают пальцы. Таким образом, при помощи напряжения и расслабления определенной группы мышц человек может управлять работой протеза. Такие протезы называются бионическими (от древнегреч. — живущее), то есть являются решениями, непосредственно заимствованными у живой природы.
Четыре вида протезов
Протезы верхних конечностей разделяются на две основные группы — пассивные (косметические и функциональные) и активные (тяговые и миоэлектрические).
Косметические протезы являются высококачественными муляжами здоровой руки, хотя и позволяют выполнять некоторые простые действия, например, поддерживание и толкание предметов. При этом технологии производства косметических протезов могут быть использованы при изготовлении съемных оболочек активных протезов.
К функциональным протезам относятся протезы с возможностью смены насадок, которые могут быть выполнены в виде различных инструментов — крюк, зажим, кольцо, гаечный ключ, молоток и др.
Тяговые протезы представляют собой простейшую версию активных протезов и приводятся в движение при помощи сгибания локтевого сустава, вследствие чего обладают ограниченной функциональностью за счет всего лишь одного варианта сжатия пальцев.
Электромеханические роботизированные (бионические) протезы являются наиболее эффективными решениями для протезирования, так как способны более точно копировать кинематику кисти руки здорового человека за счет использования нескольких независимых приводов для пальцев. Использование большего числа степеней свободы (как правило, пяти-шести) по сравнению с тяговыми протезами позволяет управлять положением пальцев, за счет чего становится возможным выполнение сложных сочетаний движений и реализация разнообразных положений пальцев (паттернов), что позволяет эффективнее захватывать предметы.
Особенности бионических протезов
Последнее десятилетие отмечено высокой активностью среди разработчиков антропоморфных манипуляторов захвата для роботов и бионических протезов рук. В подобных манипуляторах для роботов (DLR Hand II Аэрокосмического центра Германии, Shadow Dexterous Hand компании Shadow Robotics) используются до 22 приводов для управления пальцами, применяются тактильные сенсоры на контактных площадках. Система управления позволяет автоматически схватывать предметы различных форм. Но в качестве протезов подобные решения использоваться не могут из-за большой массы и габаритов предплечья, в котором размещаются сервоприводы. Поэтому, в отличие от антропоморфных манипуляторов, для роботов в бионических протезах используются ограниченный набор приводов и специальная конструкция пальца, в которой дистальная фаланга объединяется с медианной для снижения числа подвижных элементов. Это необходимо, чтобы снизить массу протеза и разместить электронику и моторы внутри кисти, так как автономная кисть позволяет выполнять протезирование с различной степенью ампутации предплечья.

Своими успехами разработчики бионических протезов обязаны последним достижениям науки и техники в области аккумуляторов высокой плотности, появлению различных сенсорных устройств, позволяющих бионической руке чувствовать и ощущать взаимодействие с объектами подобно человеку, компактных электрических моторов, высокая эффективность которых обусловлена прогрессом в области производства магнитов на основе редкоземельных металлов. А также микропроцессорам, способным с высокой скоростью обрабатывать информацию от множества сенсоров и принимать решение по управлению приводами пальцев для достижения заданного положения.
Благодаря 22 степеням свободы кисть человека позволяет выполнять сложные сочетания движений, захватывать предметы различной формы. Развитая система осязания дает возможность захвата предметов на ощупь, а также надежно удерживать и выполнять манипуляции.
Современные бионические протезы обладают широким набором вариантов сжатия, специально разработанных для повседневных задач. Управление режимами работы таких протезов может осуществляться как за счет регистрации биопотенциалов на остаточных группах мышц пользователя, так и электрической активности головного мозга, либо при помощи специальной панели управления.

Для пользователя на данный момент недоступно непосредственное управление движением каждого отдельного пальца протеза. Это обусловлено отсутствием коммерческих решений для интеграции с существующими бионическими протезами, а также сложностью в реализации устройств многоканального захвата биосигналов человека. В лаборатории прикладных кибернетических систем МФТИ под руководством Т.К. Бергалиева ведутся разработки в области человеко-машинных интерфейсов на основе биосигналов человека. В частности, там разработана восьмиканальная система управления на основе ЭМГ-сигналов, позволяющая регистрировать интегральную активность мышц предплечья, повышая тем самым количество управляемых степеней свободы. Для коммерциализации разработанной технологии была создана компания ООО "Гальвани-Бионикс", получившая поддержку Фонда содействия развитию малых форм предприятий в научно-технической сфере.

Будущий пользователь может научиться пользоваться протезом с помощью специального программного обеспечения, позволяющего посредством миоэлектрических сенсоров управлять виртуальной моделью будущего протеза. К обучению можно приступать уже на ранних послеоперационных стадиях подготовки к установке бионического протеза, так как для установки протеза требуется изготовить индивидуальную приемную гильзу и может пройти продолжительное (до шести месяцев) время до сформирования окончательной культи.
Зарубежные разработчики протезов часто уделяют преувеличенное внимание количеству паттернов движения (жестов) пальцев, которое иногда доходит до 15-20. Для повседневного использования такое избыточное число не требуется и даже может создать неудобство, так как в течение дня приходится часто переключаться между наиболее подходящими паттернами, при этом используются, как правило, пять-шесть вариантов. При помощи бионических протезов человек может выполнять различные бытовые действия: пользоваться электро- и столовыми приборами, работать за компьютером, перемещать предметы и сумки, открывать емкости и бутылки, гладить белье, одеваться и многое другое.
Технически различаются два варианта компоновки бионических протезов:
- Размещение моторов внутри ладони (BeBeonic 3 (OttoBock, Германия, 2012), Michelangelo Hand (OttoBock, Германия,2011), "Миотея" ПР2-Б1 ("НПФ Галатея", РФ, 2005), Stradivary (ООО "Моторика", РФ, 2016))
- Размещение моторов внутри пальцев и, как следствие, возможность протезировать отдельные пальцы (iLimb Ultra (OSSUR, Исландия, 2008), Evolution 2 (Vincent Systems, Германия, 2015), Kleiber Solo (ООО "Клайбер Бионикс", РФ, 2016)).
Основные преимущества перспективных современных бионических протезов заключаются в следующем:
- Способность надежно захватывать предметы разных форм
- Аккуратный автоматический захват хрупких предметов с учетом развиваемых усилий
- Возможность "осязания" объектов взаимодействия за счет обратной тактильной связи
- Поворот кисти за счет дополнительных приводов
- Стабилизация предмета за счет управления положением запястного сустава.
В России в настоящее время на рынке представлен только один бионический протез "Миотея" компании "НПФ "Галатея"", разработанный более десяти лет назад. "Миотея" является наиболее доступным решением, имеет одну степень свободы и может управляться при помощи одно- или двухканальной системы. В первом случае закрытие и раскрытие кисти производится при помощи одной мышцы, во втором используются разные мышцы. Данный протез значительно уступает по функциональности зарубежным.
Перспективными разработками доступных бионических протезов, не уступающих зарубежным аналогам по функциональности, занимаются отечественные компании ООО "Моторика" (Stradivary) и ООО "Клайбер Бионикс" (Kleiber Solo).

Компания "Моторика" представила первый в России детский активный тяговый протез "Киби", предназначенный для выполнения захвата небольших предметов. "Киби" изготавливается по индивидуальным меркам по технологии селективного лазерного спекания порошка. В настоящее время компания "Моторика" разрабатывает предсерийный прототип бионического протеза кисти Stradivary, обладающего шестью степенями свободы с размещением приводов внутри ладони. Протез Stradivary планируется оснащать специальным модулем с функцией умных часов.

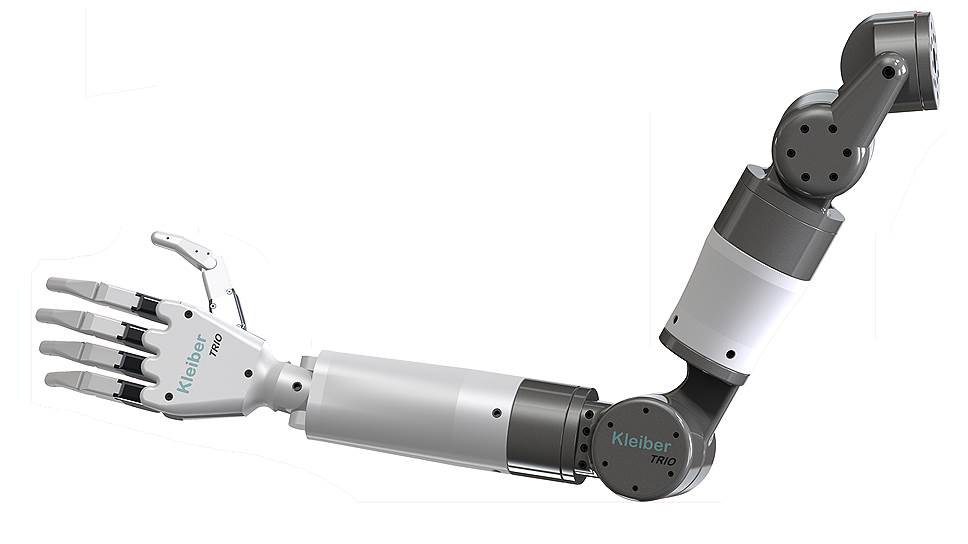
Линейка разрабатываемых протезов Kleiber компании "Клайбер Бионикс" предназначается для людей с различной степенью ампутации верхних конечностей. Ключевой особенностью этих протезов является использование тактильных сенсоров, размещаемых на подушечках пальцев. Конструктивно тактильный сенсор представляет собой группу контактных площадок, покрытых иммерсионным золотом, поверх которой располагается чувствительный эластомер — композит квантового туннелирования (QTC). Это материал, который в нормальном состоянии является изолятором, но становится проводящим под действием внешних факторов: давления, натяжения или скручивания. Тактильный сенсор позволяет измерять не только нормальную составляющую приложенного воздействия, но и тангенциальную. Измерение последней позволяет значительно улучшить качество системы управления захватом, обеспечивая определение момента начала проскальзывания удерживаемого объекта. Протез дает возможность осязания взаимодействия с предметами, что обеспечивает аккуратный захват легких и хрупких предметов, а пользователь получает обратную тактильную связь. Кисть Kleiber Solo представляет собой сменный модуль, приводимый в движение шестью приводами, который может быть установлен на персональную культеприемную гильзу, а также предназначается для работы в составе протезов руки Kleiber Duo и Trio.

Пользователи протезов Kleiber и Stradivary могут самостоятельно настраивать конфигурацию или выбирать из набора готовых паттернов захвата при помощи специальных мобильных приложений, управление протезами осуществляется при помощи миоэлектрических модулей, входящих в комплект поставки. Заряда аккумуляторов хватает на 10-12 часов активной работы. Стоимость бионических протезов Kleiber и Stradivary в несколько раз ниже зарубежных аналогов.
Также компания "Клайбер Бионикс" совместно с разработчиком сервоприводов "РУ.Роботикс" проводят разработку бионического протеза руки выше локтевого сустава Kleiber Duo и Trio. В этих протезах для движения локтевого и плечевого суставов используются до четырех дополнительных приводов. Так, бионические протезы рук для пациентов с ампутацией выше локтевого сустава в данный момент представлены в США (APL's Modular Prosthetic Limb Университета Джонса Хопкинса и Arm System исследовательского центра DEKA Research) и Германии (DynamicArm компании OttoBock). Для управления такими протезами используются многоканальные системы регистрации биопотенциалов.
Одной из задач при разработке бионических протезов является преодоление так называемого эффекта "зловещей долины". В 1978 году японский ученый Масахиро Мори при исследовании эмоциональных реакций на внешний вид роботов обнаружил, что люди с симпатией относятся к антропоморфным механизмам до определенного предела человекоподобия. Максимальное же сходство с человеком, наоборот, вызывает у них тревогу, отвращение и страх. Этот крутой провал на графике зависимости симпатии окружающих от человекоподобия робота и получил название "зловещей долины".
Эффект "зловещей долины" распространяется и на людей, использующих протезы. Одним из способов изменить отношение к таким людям является популяризация протезно-ортопедического оборудования. Это происходит, например, во время Паралимпийских игр, а также впервые прошедших в прошлом году в Швейцарии соревнований среди людей с ограниченными возможностями Cybathlon, в которых одной из дисциплин было соревнование среди пользователей роботизированных протезов рук на ловкость и скорость выполнения манипуляций с предметами.
Возможное будущее (2025 год)

Благодаря достижениям науки и техники люди с ограниченными возможностями смогут в значительной степени восстановить функциональность руки и способность к самообслуживанию. Утрата верхних конечностей перестанет быть серьезной проблемой, влекущей за собой потерю трудоспособности. Ежегодно будут проводиться специальные соревнования среди людей с бионическими протезами, заявки на выплату компенсаций за установку бионических протезов руки начнут приниматься в режиме одного окна, а время восстановления утраченной трудоспособности из-за различной степени ампутаций составит не более двух недель. Но главное, здоровые люди перестанут испытывать дискомфорт при общении с людьми-"киборгами", а роботизированные протезы будут восприниматься как один из гаджетов, наподобие умных часов.
PDF-версия
- 44
- 45
- 46
Протезами конечностей называют особые, технические средства реабилитации. Они призваны заменить утраченные частично или полностью, либо имеющие некоторые врожденные дефекты конечности, как верхние или нижние. Протезы служат для устранения функционального дефекта, но также несут на себе косметическую нагрузку.
Причины ампутации конечностей
К сожалению, подобные операции даже при современном развитии медицины – не редкость. Среди самых частых причин ампутации отмечаются:
- запущенный атеросклероз кровеносных сосудов, в результате сужения которых происходит ухудшение кровоснабжения тканей, в итоге отмирающих;
- травмы костей, нервов, мышц,
- злокачественные опухоли костей, нервов, мышц,
- возникновение инфекций, опасных для жизни, с очагом, расположенным в конечности;
- несчастные случаи и другие.
Современное протезирование — важнейший завершающий этап лечения. Чем ниже проведена ампутация, тем совершеннее будут результаты. Медицинский прогресс в этой области позволяет создавать уникальные протезы разного назначения. Процедура осуществима даже при минимальных культях конечностей. Такие достижения позволяют снизить актуальность уровня ампутации, но не снимают вопрос полностью.
Если в дальнейшем предполагается протезирование, возрастают требования:
- к технике проведения ампутаций;
- к созданию ампутационной культи;
- к подготовке ампутационной культи.
Современное протезирование конечностей предполагает возможность установки лечебно-госпитальных или постоянных протезов. В первом случае целью протезирования становится обучение пользованию оборудованием.
В свою очередь постоянные протезы делятся на:
- рабочие, предназначенные для удержания, использования инструментов, самообслуживания;
- активно-функциональные протезы, при создании которых применяются особые механизмы;
- функционально-косметические — наиболее сложные, поскольку по своей форме и функциям они приближены к конечности.

Компания ОТТО БОКК является крупнейшим мировым производителем самых инновационных изделий для пациентов с ограниченными возможностям. Подразделения компании представлены в 36 странах мира, а продукция поставляется уже в 140 стран. Такая широкая география позволяет людям даже с самыми сложными проблемами избавиться от кажущейся безысходности.
К основным видам протезов нижних конечностей относятся:
- протезы бедра,
- протезы голени,
- протезы стопы
К основным видам протезов верхних конечностей относятся:
- протезы предплечья,
- протезы плеча,
- протезы кисти,
- протезы пальцев.
Как выбрать протез нижней конечности
Врачи-ортопеды и мировые производители протезов, среди которых лидирующие позиции занимает компания ОТТО БОКК, осуществляющая поставки своей продукции в 140 стран мира, создают все более совершенные, инновационные технологии и методы протезирования. При изготовлении протезов верхних и нижних конечностей применяются новейшие материалы, позволяющие сделать универсальные модели, благодаря которым многие инвалиды словно рождаются заново.
Огромное значение при выборе и индивидуальном изготовлении протеза ноги особое внимание уделяется:
- состоянию здоровья инвалида,
- состоянию его культи,
- точности расчета массы тела пациента.
Очевидно, что культя будет опираться на протез, поэтому нагрузка должна распределяться равномерно на все части культи. Задача специалистов — точно подогнать протез, исходя из вышеуказанных параметров. Учитывается конечный вес изделия, конструкция крепления, способы, с помощью которых пациент будет управлять им.
Как выбрать протез верхней конечности
Реабилитация после ампутации имеет очень важное значение и влияет на дальнейшую жизнь пациента. Первый протез накладывается через 3-4 недели после ампутации. Это временный механизм, который позволяет человеку приспособиться к новой жизни и свыкнуться с мыслью об отсутствии конечности. Постоянный протез подгоняется лишь после того, как полностью проходит послеоперационная отечность. Для того, чтобы реабилитация после ампутации прошла максимально быстро и просто, а производитель смог получить самые точные данные для создания постоянного протеза, разрабатываются тренировочные протезы.
Специалисты компании ОТТО БОКК, одного из лидеров среди производителей протезов, помогают пациентам избежать любых возможных осложнений в период реабилитации и подбора протеза. Для того, чтобы в результате ошибок не образовались порезы или потертости, не возникло отмирание незадействованных мышц, уменьшение культи, развитие порочной культи, требуется тесное взаимодействие лечащего ортопеда и производителя протеза
В период реабилитации пациенту необходимо строго соблюдать все рекомендации специалистов:
- по уходу за послеоперационным швом,
- по формированию культи,
- по поддержанию подвижности суставов,
- по укреплению сохранившейся мускулатуры.
За уходом в послеоперационный период следят врач и медсестра. Специалисты компании ОТТО БОКК разработали особые средства и технологии, которые помогают осуществлять щадящий уход за нежной кожей культи и швом. Особое внимание в этом вопросе уделяется пациентам с нарушением кровообращения и сахарным диабетом. Специальная противоотечная терапия помогает без осложнений снять результат естественной реакции организма на вмешательство хирурга. Проводится также профилактика контрактур суставов – возможного ограничения пассивных движений. Его причиной становится рубцовая деформация мышц, сухожилий, кожи, самого сустава.
В отделении протезирования ОТТО БОКК помогут снять фантомные боли — болевые ощущения, якобы возникающее в утраченной конечности. Для этого проводятся специальные массажи, лимфодренаж культи и многие другие процедуры. Иногда пациентам может потребоваться даже блокада нервов и хирургическое вмешательство. Важна и психологическая реабилитация, которую успешно ведут дипломированные и опытные специалисты компании.
Читайте также: